
ヒトの歩行シミュレーションモデルの開発とその応用研究
担当教員:内藤尚(准教授)| 我々が社会生活を送る際に用いるインフラや機器などは(二足)歩行を前提にして設計されているものも多く,歩行は我々が快適に生活する上で重要な身体運動であると言えます.疾病や障害などで歩行ができなくなると社会生活において現在でも多くの制約が発生するため,再び歩行できるようにする訓練を行ったり,歩行支援機器を適用する歩行リハビリテーションが行われます.この際に必要となる歩行支援機器として,これまでもいろいろな物が開発・実用化されていますが,歩行支援機器の開発研究は,利用対象者の人数が少ないことや疾病や障害に伴う症状が個人毎に大きく異なることなどの理由により,難しいと言われています.
この研究では,種々の障害のある場合の歩行を計算機上で再現するシミュレーションモデルを開発し,そのモデルをCAE(Computer aided engineering; 計算機援用開発)の一部として利用して歩行支援機器の開発をより合理的・効率的に行うシステム環境を構築することを目的としています. |
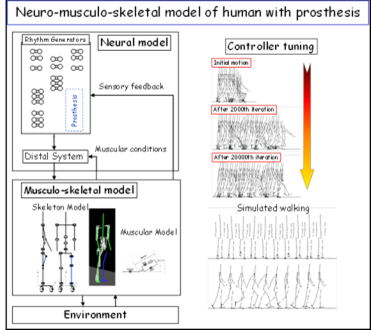
| 本研究ではHaseらのモデル(1998)を基に歩行シミュレーションモデルを開発しています.まず,身体構造を骨格系と筋肉からなる筋骨格モデルで表し,そこに運動指令を送る運動神経系である運動制御モデルを組み合わせます.この運動制御モデルとして,Matsuoka(1985)が提案した神経振動子モデルを複数組み合わせたTagaらのモデル(1990)を用いています.運動指令信号を作り出す運動制御モデルのモデルパラメータを生成される運動が歩行になるように適切に調整することで複数歩の歩行が生成されます.このモデルを基に股関節離断モデルを作成し,股義足の設計を行いました. |
|