義足の力学特性計測システムの開発
担当教員:内藤尚(准教授)| 義足は下肢切断者の脚の機能を代替する重要な福祉機器であります.その製作工程は使用者の断端部の形状や脚の長さ・関節角度といった身体特性が個人毎に異なることから義足の特性を使用者に適合させる必要があります.しかし,現状ではその特性を定量的なものとして計測する手法が確立していないためにその適合性の評価も医師や義肢装具士などから成るメディカルチームの各専門家の経験に基づく主観的なもので客観性・再現性が低いことが課題です.
義足の性能を決定している要素は多岐に渡りますが, 本研究ではその中でも義足の運動に大きな影響を与えている機械的特性を計測するシステムとして,各種義足の運動モデルの構築や,その特性を同定するアルゴリズムの開発及び計測する環境の構築を目的としています. |
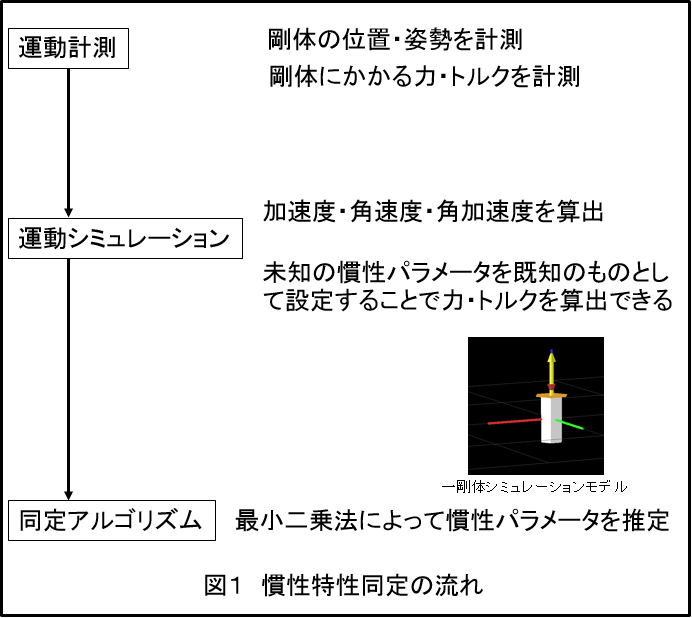
| 本研究ではまず下腿義足を想定し一剛体の運動シミュレーションを開発しています.このプログラムでは運動の計測機器として用いている光学式モーションキャプチャから得られる位置・姿勢データを入力することで同定に必要な加速度などの運動量を算出します.また剛体の質量や重心位置,慣性モーメントといった慣性特性として評価する値である慣性パラメータを既知のものとして設定することで本来六軸力覚センサを用いて計測する剛体にかかる力・トルクを算出します.これにより運動モデルの精度検証や計測する運動速度が同定に及ぼす影響を検証しました. |
|