
種々の環境における歩行運動計測と運動解析
研究者:関根広大(大学院生)、岩切悠河(学部生)担当教員:内藤尚(准教授)
| 路面環境の違いや履物の種類などは,人の歩行運動を大きく変えることから,歩行運動に多大な影響を与えると考えられています.現状では,光学式モーションキャプチャを用いる手法等による計測環境の制約により,歩行計測の研究の多くは整地路面での歩行に限定されてきました.9軸センサは低コスト,非拘束で計測範囲に制限がないため,種々の環境における歩行運動を計測することができます.
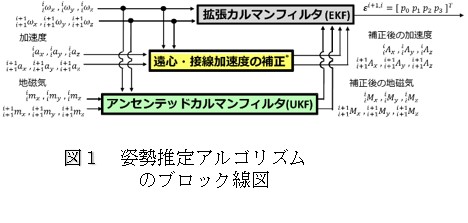
本研究では,センサフュージョンと呼ばれる手法を用いて,ジャイロセンサのドリフト誤差を,加速度,地磁気からそれぞれ得られた姿勢情報を組み合わせることにより,個々のセンサの欠陥を補正し,正確な姿勢情報を推定できるアルゴリズムの構築を行い,身体運動をした際の3次元姿勢の精度を検証します.その後,種々の環境における歩行運動計測を行い,通常歩行における歩行との比較をします. |
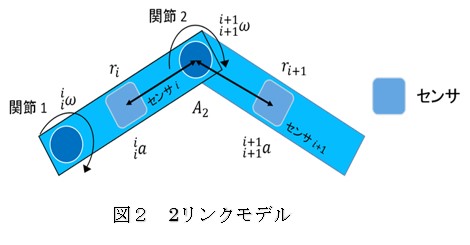
| 本研究では,2組の3軸ジャイロセンサ,3軸加速度センサ,3軸地磁気センサが搭載された9軸センサをセンサフュージョンと呼ばれる手法を用いて相対座標系における3次元姿勢を推定するアルゴリズムを考案しました.図2に示すように,測定したい関節を挟むようにそれぞれセンサを取り付け,センサiからみたセンサi+1の関節角度を推定することで,相対座標系における3次元姿勢を推定することができます.この手法を身体運動計測に用いることで,坂道,砂利道,履物の違い等による種々の環境における歩行運動計測を行い,歩行の特性を分析しようと考えています. |
|