
ヒト足部の計測・力学解析
研究者:横野拓也(大学院生),竹内康浩(学部生)担当教員:内藤尚(准教授)
| ヒトは生活環境における移動様式として,主に二足歩行を行う唯一の動物です.ヒトが滑らかで安定した歩行を可能にしている要因として,複雑な足部の構造が挙げられます.ヒトの足部は26個の骨,33箇所の関節から構成されており,特徴的な3つのアーチが存在して, 足部はこの複雑な構造を利用することで,「接地時における衝撃を和らげる」「力を効率よく地面に伝える」「姿勢を安定に保つ」などの種々の役割を果たしていると考えられています.しかし,運動時における足部の骨の動きを直接計測することが困難であることなどから足部が上記のような役割を果たしているメカニズムは未だ解明されていません.このメカニズムの解明により,根拠に基づいた足部疾患に対する治療法や,足部の機能を補助する器具(靴や足底板など)の設計法の確立に大きく貢献することが期待できます.
そこで本研究では,実形状から足部および足関節の力学モデルを構築し,順動力学的に骨構造の変化を,逆動力学的に筋張力を推定することで,足部骨格構造が果たしている力学的機能の解明を目指しています. |
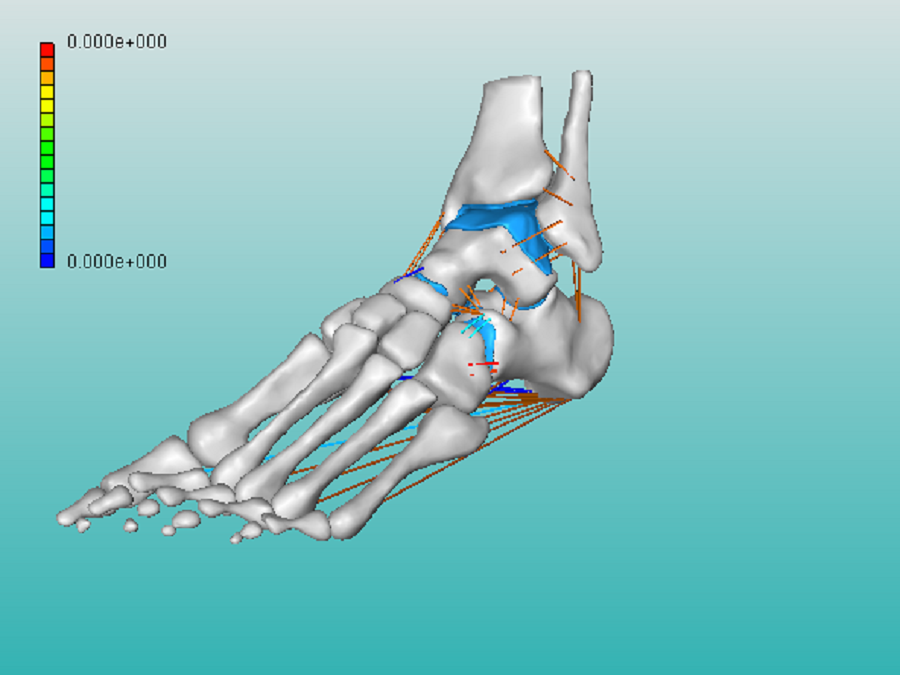
| 本研究では,右図のような足部の筋骨格モデルを構築し,このモデルで運動解析を行うことで運動時における足部の動きや負担・筋力などの推定を行っています.足部筋骨格モデルは,MR画像を基に足部骨格の実形状を再現し,靭帯や関節軟骨などの要素モデルを加えることで構築しました.解析手法は,先行研究であるnagahama(2016)が提案した解析手法を用いています.数値シミュレーションを行う上で構築するモデルの妥当性は,運動特性を計測した実験結果と,今回の解析結果と比較することで検証し,実際に歩行運動時における解析も行っています.
今後は,現在使用している運動解析手法を用いて,筋の活動原理から筋力を適切に分配する推定手法を確立することで,筋力の推定を目指します. |
|